
Ce groupe est composé de:
- Sirine Amiri 2ème année, ESPCI
- Alexis Jonville 2ème année, ESPCI
- Juan Quintero 2ème année, ESCPI
- Charles Brissot 3ème année, Mines ParisTech
Contexte
Ce projet s’intègre dans une semaine de cours inter-écoles du réseau PSL. Tenue à l’École Nationale Supérieur des Arts Décoratifs, cette session est consacrée à l’étude des technologies dites moles, qui servent notamment dans le domaine de la « soft robotics » (ou « robotique molle »). Qu’elles se basent sur les propriétés de matériaux élastiques, diphasiques ou thermo-extensibles, elles permettent une plus grande souplesse de mouvement aux robots ainsi qu’une dangerosité réduite. Mais cette mollesse affecte aussi indirectement notre conception ceux-ci, les rendant plus « naturels », plus attachants.
Ce cours nous permet donc d’explorer toutes les perpectives offertes par ces technologies autant d’un point de vue design qu’artistique.
Objectif du projet
Nous nous nous sommes initialement inspiré d’un projet artistique: le lotus dome, de Daan Roosegaarde. Nous avons en effet été touché par l’interactivité et l’élégance de ce projet.
Nous avons donc voulu recréer un objet réagissant aussi aux comportements du spectateurs. La première idée fut de créer un être vivant tentaculaire qui agirait de manière aléatoire à l’approche d’un visiteur, en se repliant sur soi ou en augmentant sa taille pour effrayer la potentielle menace représentée par le public.
Puis au fil des recherches et des expérimentations, nous avons convergé vers un objet entre animal et végétal, entre mécanique et vivant, entre passivité et activité… Bref, un entre-deux qui évolue selon le comportement du spectateur.
Rendu du projet
Avant d’en dire plus, nous vous laissons admirer le rendu final du projet. Tout au long de l’expérience, n’hésitez pas à vous questionner sur les ressentis que vous avez par rapport à l’objet. Par exemple, quel éléments connus appliquez-vous à cet ouvrage, à quel imaginaire la raccrochez-vous ?

Démarche adoptée
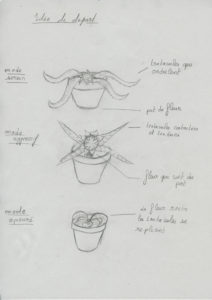
Sur cette base d’un objet réagissant au spectateur, nous avons voulu recréer plusieurs réactions différentes. Tout d’abord, un comportement oisif en l’absence de visiteur. Ensuite, deux comportements en réaction à l’approche du spectateur: le replis sur soi et une technique agressive pour apeurer l’ennemi.
Ces actions seraient réalisées simultanément par différentes parties mobiles de l’objet. Dans tous les cas, nous voulions tirer profit de la dynamique flexible et « naturelle » des actionneurs mous pour un rendu plus organique. Nous sommes donc parti sur des éléments tentaculaires qui onduleraient ou se dresseraient, inspirés des poulpes ou des plantes rampantes, ainsi que des éléments surgissant, inspirés des anémones de mer ou des plantes qui se ferment au toucher.
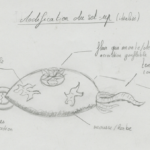
La figure ci-dessous décrit le projet tel que nous l’avons imaginé initialement:
Voici deux éléments sur lesquels nous avons travaillé:
Les tentacules ondulantes
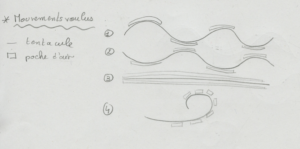
Nous avons eu pour objectif de réaliser un élément rectiligne qui aurait la capacité d’onduler, de se dresser et de se rétracter (correspondant aux réactions décrites ci-dessus). Chaque comportement nécessite une architecture pneumatique différente, et nous avons procédé étape par étape pour tenter d’approcher ce triple comportement idéal.
Premier essai: utilisation de bâche plastique thermoformable
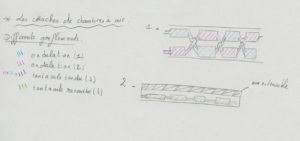
Tout d’abord, nous avons réalisé un essai avec de la bâche plastique. L’idée était d’aligner plusieurs coussins d’airs sur une même pièce, qui pourraient se gonfler indépendamment. Le but serait d’avoir deux couches, et de gonfler successivement deux ensembles de poches réparties en quinconce, afin de créer un mouvement d’ondulation.
Nos essais sur bâches plastiques n’ont pas été très concluants, dans la mesure ou il est assez complexe de réaliser des poches étanches, et plus l’alimentation en air est diversifiée, et plus les risques de non étanchéité sont élevés.

Deuxième essai: utilisation de silicone avec un moule en carton plume
Nous sommes donc parti sur l’utilisation de silicone pour réaliser notre tentacule. Le silicone nous permet notamment de réaliser plus proprement les labyrinthes d’air qui assurent le mouvement ondulatoire de la tentacule
Il a donc fallu réaliser un moulage, et nous avons commencé par réaliser un moule en carton plume, plus aisé à réaliser, mais en contre-partie plus grossier par rapport à un moule imprimé en 3D.
Le résultat est mitigé, dans la mesure où le labyrinthe d’air fonctionne bien, et l’étanchéité était bien assurée. Cependant, la pièce moulée est trop épaisse et le silicone trop dur, ce qui fait que le mouvement d’ondulation est quasi-inexistant.



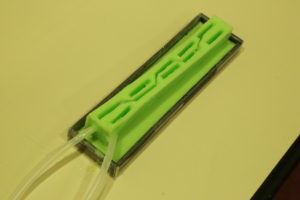
Troisième essai: utilisation de silicone avec un moule imprimé
Nous avons donc réalisé un moule en 3D afin de pouvoir réaliser une tentacule plus petite et qui puisse se tordre plus facilement. Comme le labyrinthe d’air ne permet pas de faire un seul moule en silicone, il a fallu réaliser le moulage en plusieurs étapes. Les figures ci-dessous présentent la forme du moule utilisée
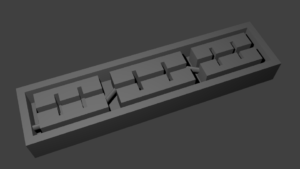
Ce moule permet de former le labyrinthe d’air. Grâce à la symétrie du système, les deux parties sont réalisées à l’aide du même moule, puis il faut les recoller en trois étapes pour lier les poches d’air et les boucher aux extrémités

Cependant, par manque de temps, nous n’avons pas eu le temps de tester et d’intégrer cette petite tentacule dans le produit final, mais nous avions bon espoir que celle-ci réagisse mieux à la sollicitation pneumatique.

Les tentacules plates
Pour accompagner cette tentacule mouvante, nous avons réalisé deux tentacules en silicone assez simples, qui ne se plient que dans un sens, ce qui donne un effet de battement d’aile ou de nageoire à la tentacule.
L’accordéon
Cette seconde partie a pour objectif de reproduire le mouvement surgissant ou rétractant à l’approche des visiteurs.
Premier essai: accordéon simple actionné à l’extérieur
Pour commencer, nous avons tenté de réaliser un accordéon en papier monocylindrique (un peu comme les grilles d’entrée de parking extensibles, dont la structure en losange permet un allongement modulable), actionné par l’extérieur à l’aide de bâches plastiques.
Cependant, nous avons rapidement abandonné cette piste car la structure n’était pas assez solide et l’arrivée d’air fuyait.
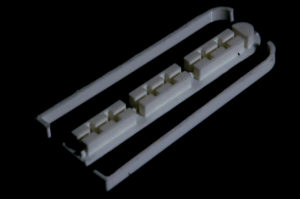
Deuxième essai: accordéon creux sur base de papier plastifié
Nous avons donc décidé de réaliser un accordéon creux (donc avec la même forme que l’instrument). Les figures ci-dessous illustrent la manière dont cet accordéon a été réalisé.




La première idée pour l’actionner fut de placer en son sein une poche d’air en bâche plastique qui, en se gonflant, déploierait l’accordéon, et le replierait en se rétractant. Cependant, il fut aussi assez complexe de réaliser une poche plastique bien étanche et assez puissante pour l’actionner.
Nous avons donc décidé de le remplir directement d’air, utilisant le fait que le papier plastifié est étanche. Mais il y avait encore un problème d’étanchéité aux extrémités. Nous avons donc moulé du silicone aux extrémités pour étanchéifier l’arrivée d’air et le bout de l’accordéon, ce qui fut une réussite !

Troisième essai: moulage silicone de l’accordéon papier
Nous avons aussi essayé de mouler un accordéon en silicone sur la base d’un accordéon papier, afin d’obtenir un accordéon encore plus robuste. Cependant, ce fut un échec car l’accordéon ainsi réalisé était beaucoup trop épais et ne se dépliait pas.

Quatrième essai: accordéon plus petit sur base de papier plastifié renforcé au silicone
Nous avons pour finir réalisé un second accordéon en papier plastifié, mais plus petit cette fois-ci. Or cette mise à l’échelle a posé quelques problèmes d’étanchéité, et nous avons alors décidé d’injecter du silicone à l’intérieur même de l’accordéon en plastique afin de le renforcer et de l’étanchéifier. Cet essai fut alors couronné de succès.
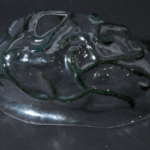
La carapace
Afin de réunir tous ces éléments et de les soutenir pour donner une vraie forme à notre objet, nous avons réalisé une carapace en plastique.
Celle-ci fut moulée autour d’une structure en argile mise en forme par nos soins. Nous avons pris soin de lui donner des aspect organiques pour favoriser les projections mentales du spectateur sur l’objet.
Décoration des éléments mouvants
Afin de donner un aspect organique à notre objet, nous avons rajouté quelques éléments décoratifs sur les éléments mouvants.
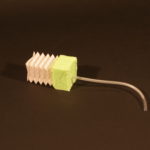
Création de feuilles en silicone
Pour donner vie aux accordéons réalisés précédemment, nous avons réalisé des moulages silicone de vraie feuilles de buisson à mettre aux extrémités de l’accordéon, et qui donnent encore plus de mollesse au mouvement. Nous avons aussi réalisé une fleur papier en origami pour embellir d’avantage l’extrémité de l’accordéon.



Réalisation d’une peau écaillée
De la même manière, nous avons réalisé une peau écaillée à partir de papier cartonné plié et légèrement peint. Ce papier permet de recouvrir les tentacules.

Description de l’ouvrage produit
Au fur et à mesure du projet, nous avons donc revu le design de notre objet.

L’objet représente donc un être carapacé, avec quelques tentacules sur le devant bougeant dans toutes les directions, et dont la mollesse d’action provoque une certaine empathie chez le spectateur. On peut d’ailleurs constater un écart entre la deuxième version du design et l’objet produit, l’ouvrage ayant encore évolué entre temps.
Cet ouvrage est bien entendu plus un premier prototype qui aurait vocation à être amélioré et automatisé, mais elle possède tout de même actuellement une forme et un mouvement permettant déjà de projeter son imagination sur la chose, bien qu’actionnée manuellement.
Conclusion
Nous avons donc pu tester et mettre en place différentes technologie de robotique molle dans un projet artistique interactif. Les perspectives de ce projet seraient de l’intégrer dans un système électronique alliant des capteurs de présence et des actionneurs pneumatiques qui permettraient de rentre le robot encore plus vivant et interactif. Cela permettrait de renforcer l’aspect organique et indépendant de l’ouvrage, qui par ses réactions aléatoires, permettraient aux spectateur d’appliquer leur propre regard sur l’objet.
Sirine, Alexis, Juan et Charles